벡터 멀티로터
멀티 로터 UAV는 초경량 동체 구조로 설계되어 강도를 유지하면서 임무 부하 및 배터리 시스템에 대한 초과 중량을 최대한 줄여 유휴 작동 시간을 연장합니다.
- IRSEEN
- 중국 심양
- 정보
벡터 멀티로터
소개
멀티 로터 UAV는 초경량 동체 구조로 설계되어 강도를 유지하면서 임무 부하 및 배터리 시스템에 대한 초과 중량을 최대한 줄여 유휴 작동 시간을 연장합니다.
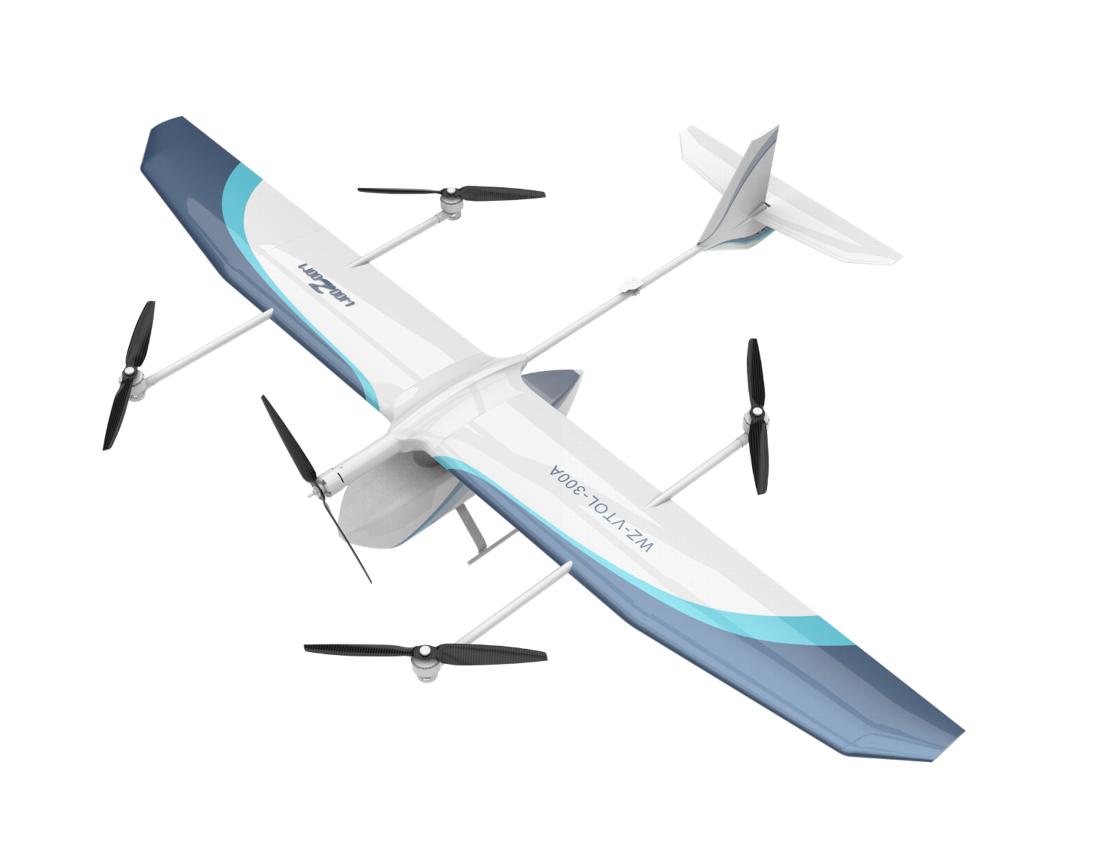
무인기 시스템은 주로 무인기 비행 플랫폼, 미션 페이로드 시스템, 지상국 시스템 및 배경 빅 데이터 관리 플랫폼으로 구성됩니다.
UAV는 다양한 임무 장비(예: 단일 조명 카메라 모듈, 다중 조명 포드 모듈 등)를 유연하게 운반할 수 있는 모듈식 설계 개념을 기반으로 설계되어 다양한 작업에 적용할 수 있으며 다중 조명 기능을 갖추고 있습니다. 장면 적용.
크기가 작고 무게가 가벼워 1인이 들고 다니며 지정된 작업 영역의 점검을 완료할 수 있습니다.
UAV는 사용이 간편하고 설치가 간편하며 유연하며 단시간에 배치할 수 있어 돌격정찰, 정찰, 수색 등 다양한 항공임무에 널리 활용될 수 있다.
기능
최대 크기 800*600*400(mm )
미션 하중 5.2kg
호버링 시간 44분
최대 비행 고도는 2000m입니다.
최대 고도는 5000m입니다.
GPS 호버 정확도 수직:±0.5m 수평±1.5m
매개변수
프로젝트 | 매개변수 |
로터 직경 | 381mm |
몸 사이즈 | 800mm * 800mm * 295.1mm |
무부하 중량 | 4.5kg |
유효 탑재량 | 2kg |
최대 비행 시간 | 30 분 |
최대 비행 속도 | 20m/s |
최대 고도 | 4000m |
작업 반경 | 5km |
GPS 호버 정확도 | 수직의±0.5m |